PoolBot
Physics-Aware Mobile Manipulator for Multi-Shot Autonomous Billiards.
PoolBot
Overview
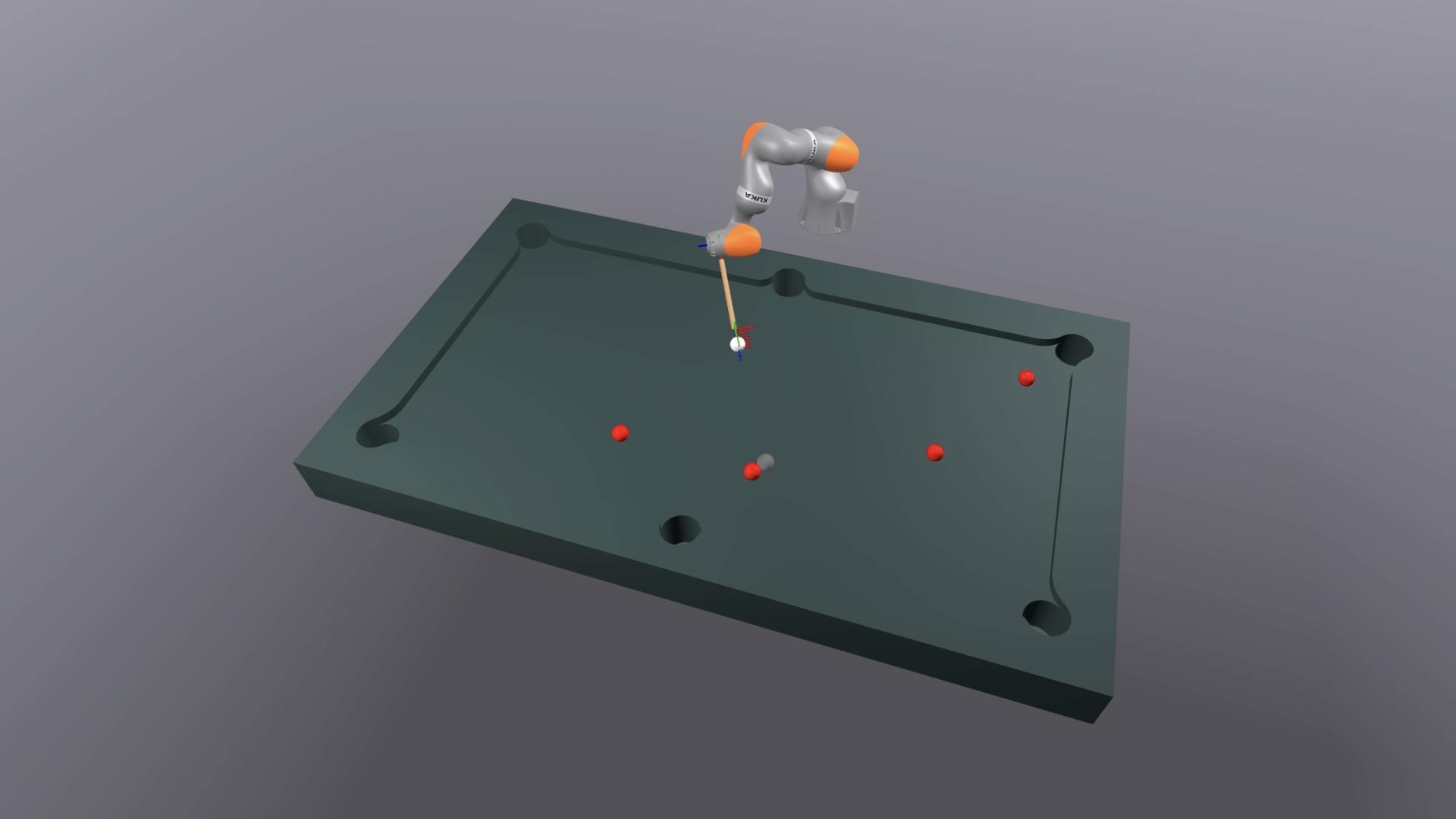
PoolBot is a physics-aware mobile manipulation system for autonomous billiards, developed as the final project for MIT 6.4210: Robotic Manipulation. The system is designed to plan and execute multi-shot pool sequences on a standard pool table by reasoning about ball dynamics, robot motion, and manipulation constraints. The project was completed by Avi Naurla, Suraj Reddy, and me, and emphasizes integrating perception, physics-based planning, and mobile manipulation into a single autonomous system.
📄 Read the full project paper (PDF)
Media
PoolBot autonomously planning and executing shots
Final project submission demo for MIT 6.4210
This post is licensed under CC BY 4.0 by the author.