Self-Driving Car
Quanser Self-Driving Car Student Competition at the 2025 American Control Conference.

Overview
I participated in the Quanser Self-Driving Car Student Competition, held at the 2025 American Control Conference (ACC) in Denver, Colorado. The competition simulated an Uber-like autonomous driving environment, where teams programmed a self-driving car to navigate a city map, pick up passengers, drop them off at target locations, and return to a home base while obeying traffic laws. Teams were scored based on the complexity and number of routes completed within a fixed time limit.
Team Structure & My Role
Our team of three divided the system into three core components:
- Perception: Camera-based detection of stop signs and traffic lights
- State Estimation: Localization using LiDAR and wheel encoders
- Control: Path planning and trajectory tracking
I was responsible for the control subsystem, focusing on global path planning and low-level path following for an Ackermann-drive vehicle.
Control System Design
Roadmap & Path Planning
To support flexible route selection, I designed a directed graph roadmap consisting of 52 nodes, connected by a combination of straight-line segments and circular arcs.
The roadmap encoded:
- Road geometry
- Legal driving directions
- Locations of stop signs, traffic lights, and yield signs
I implemented Dijkstra’s algorithm on this roadmap to compute shortest paths between arbitrary pickup and drop-off locations, enabling efficient route planning during competition runs.
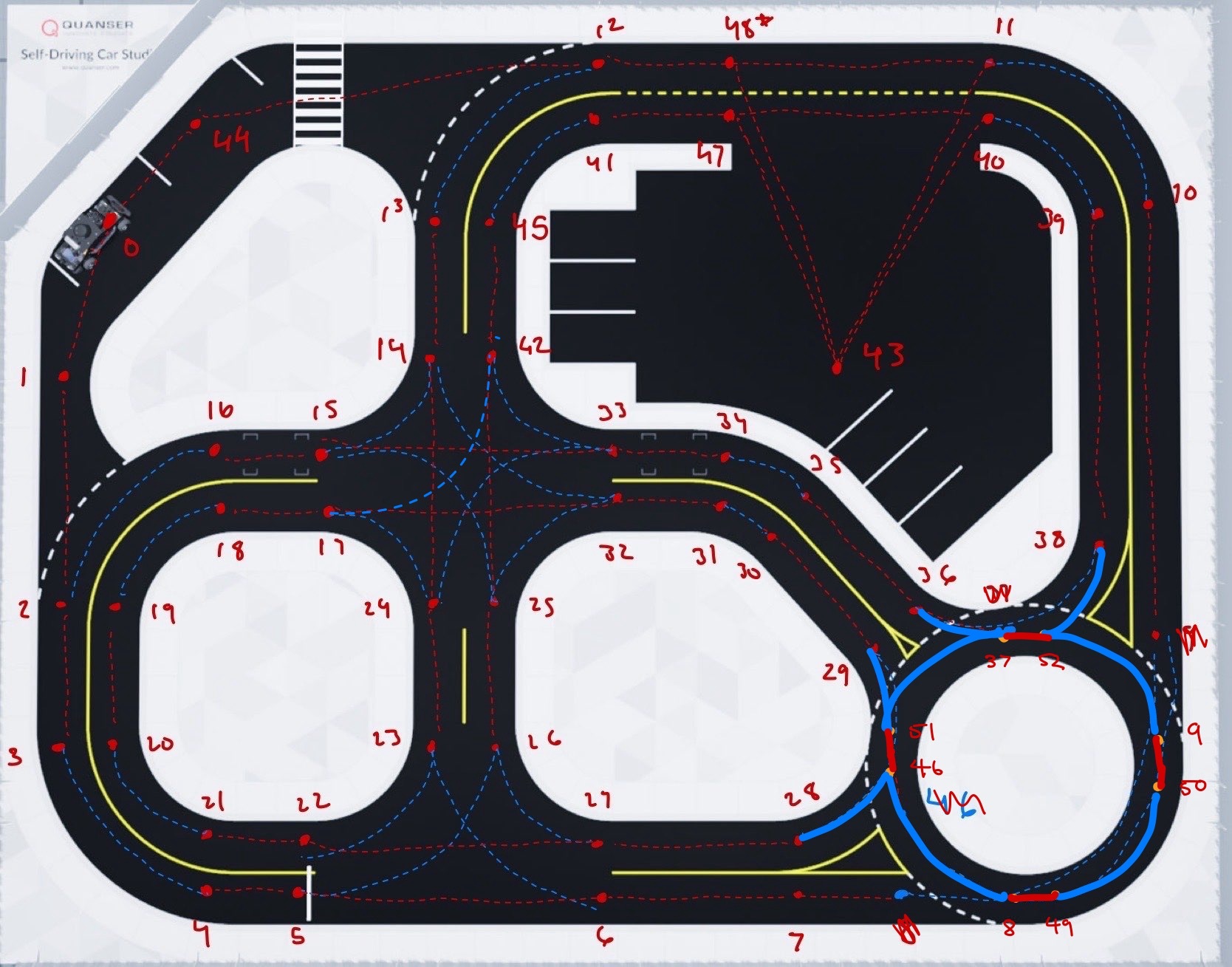 Hand-designed roadmap representing the competition environment
Hand-designed roadmap representing the competition environment
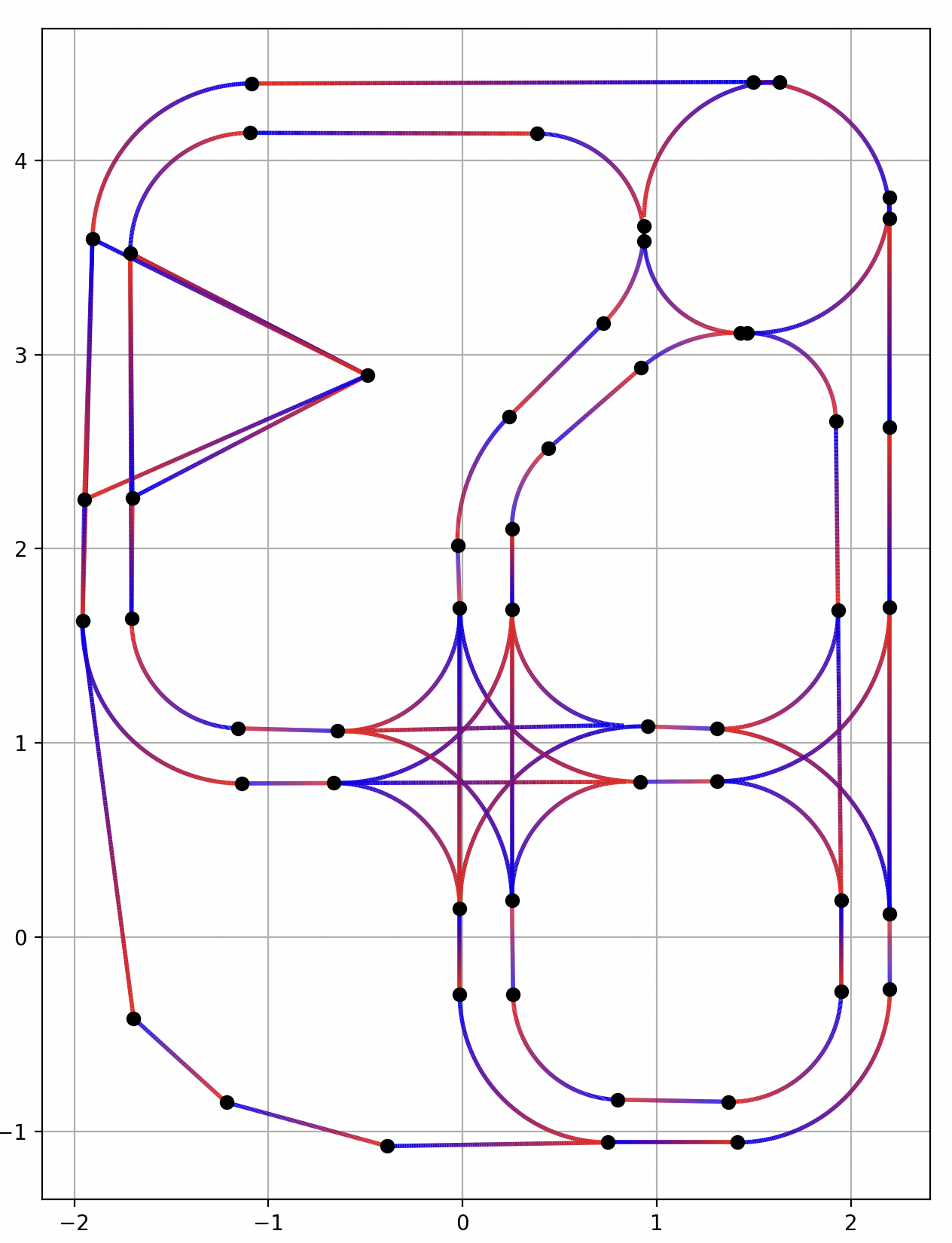 Directed graph implementation with line segments and arcs used for path planning
Directed graph implementation with line segments and arcs used for path planning
Path Following & Control
For trajectory tracking, I implemented a Pure Pursuit controller using ROS 2 and Python.
Key features:
- Ackermann steering-compatible control
- Smooth tracking of both straight and curved path segments
- Real-time command generation for vehicle steering and velocity
This controller allowed the car to reliably follow planned routes from point A to point B.
Competition Results & Lessons Learned
Our team competed at ACC and placed 6th out of 28 teams. While our control system performed as intended, overall performance was affected by system-level issues:
- Traffic light detection failures in the vision system caused penalties for running red lights
- Movable foam-core walls in the environment reduced localization accuracy
- As a result, we prioritized simpler routes over longer, more complex ones
Despite these challenges, the competition provided valuable experience working with ROS 2, multi-module autonomous systems, and the realities of deploying autonomy in imperfect, real-world environments.
Demo
Demo of the car following a planned route during competition