Multi-Agent Testbed
Multi-robot testbed for warehouse robotics.
Overview
This project explores multi-agent path finding (MAPF) in dense, warehouse-style environments, with a focus on the tradeoffs between reactive collision avoidance and planning-based coordination, and on transferring algorithms from simulation to real robots. I built a multi-agent robotics testbed spanning simulation and physical execution, enabling real-world validation of MAPF algorithms on holonomic robots.
System Architecture
The testbed integrates:
- VMAS for scalable multi-agent simulation
- ROS 2 for control, communication, and deployment
- Dockerized infrastructure for reproducible experiments
- Holonomic mobile robots (RoboMaster platform) with NVIDIA Jetson Orin Nano for real-world testing
Planning and control are run centrally, while physical robots act as low-level executors. This design enabled rapid iteration, large-scale testing, and sim-to-real transfer.
Algorithms Explored
Baseline: Move-to-Goal Control
The initial approach used simple PID-based move-to-goal control for each agent. While agents reached their goals efficiently, the lack of coordination resulted in frequent collisions as agent density increased.
Reactive Collision Avoidance
A repulsive force model was added, causing agents to push away from one another within a fixed radius. This reduced collisions compared to the baseline, but introduced:
- Oscillatory and non-smooth trajectories
- Residual collisions due to lack of global planning
 Rudimentary repulsive-force collision avoidance in simulation
Rudimentary repulsive-force collision avoidance in simulation
Planning-Based Coordination (CBS)
To enable principled coordination, the environment was discretized and a Conflict-Based Search (CBS) planner was implemented.
Key features:
- Individual, conflict-free paths per agent
- Waiting actions and collision constraints handled explicitly
- Planned paths converted to splines for smooth execution
- PID controllers used to track spline trajectories
 CBS-based planning with spline-interpolated trajectories
CBS-based planning with spline-interpolated trajectories
Evaluation & Results
Planners were evaluated using:
- Collision count
- Makespan (total time for all agents to reach goals)
- 400+ randomized simulations
- Agent counts ranging from 2 to 15
Outliers were filtered using a 1.5 × IQR rule, and results were analyzed across multiple random seeds.
Key findings:
- CBS planning reduced collisions by 84%+ compared to non-planning baselines
- Planning consistently increased makespan, revealing a safety–efficiency tradeoff
- As agent density increased, planning became increasingly beneficial
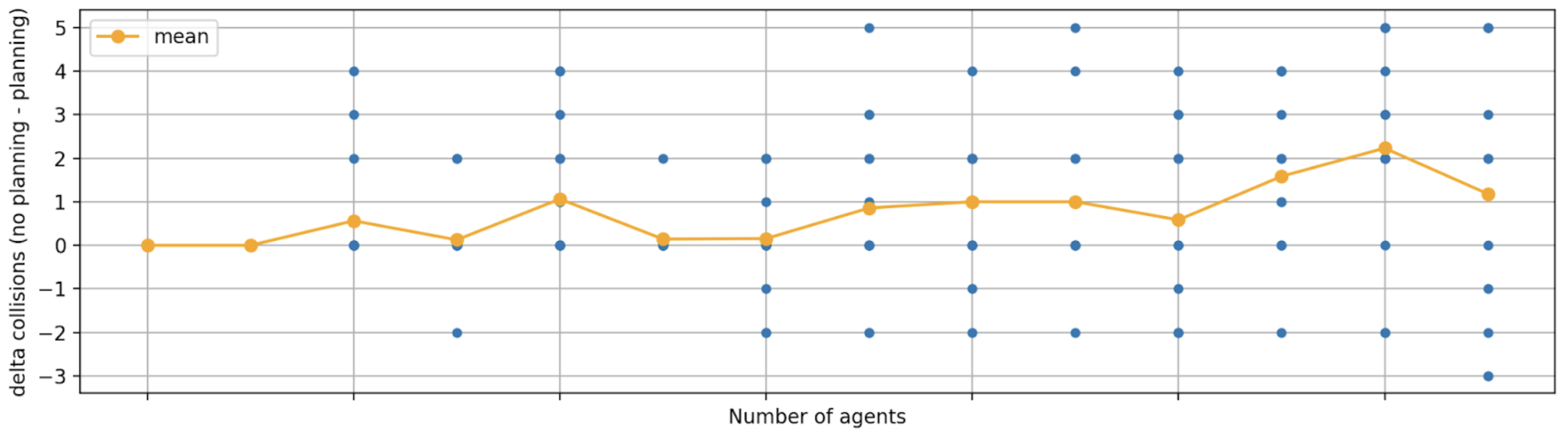 Delta collisions (no planning − planning) vs number of agents
Delta collisions (no planning − planning) vs number of agents
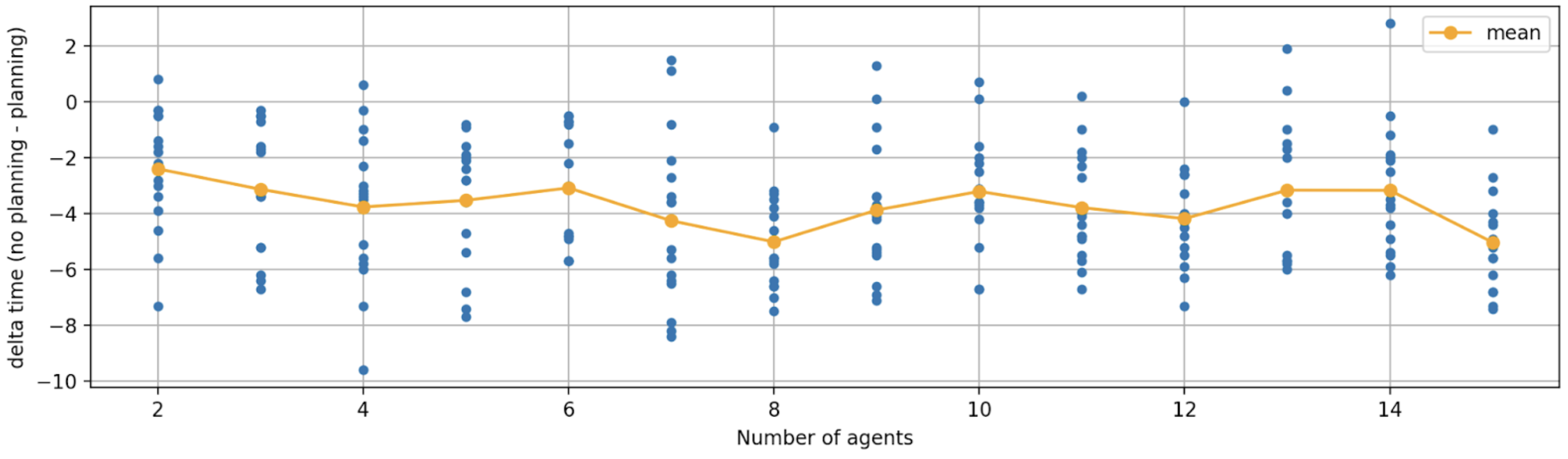 Delta completion time (no planning − planning) vs number of agents
Delta completion time (no planning − planning) vs number of agents
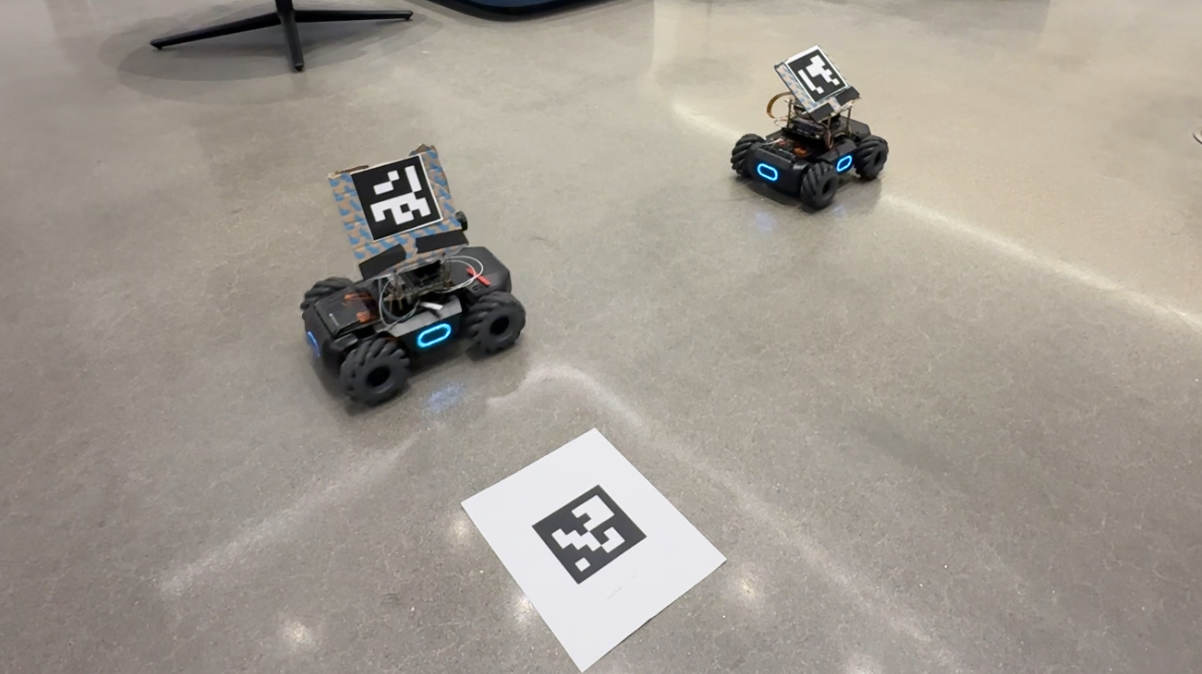
Sim-to-Real Deployment
To move beyond simulation, the system was deployed to physical RoboMaster robots.
Key infrastructure improvements:
- Migrated planning and control to a centralized ROS 2 workstation
- Eliminated Docker reset and dependency issues on robots
- Enabled synchronized multi-robot execution
With the improved localization pipeline, CBS planning was fully deployed on the physical robots. The planner generated conflict-free global paths, which were then tracked by spline-based controllers on each RoboMaster platform.
Localization & Control
A vision-based localization pipeline was developed using:
- Overhead webcams
- ArUco / ChArUco markers
- Camera calibration and global-frame anchoring
This enabled:
- Real-time pose estimation for multiple robots
- Field-centric control
- Independent P/PID control of (x), (y), and heading
- EKF-based fusion of dual-camera global measurements with dead reackoning measurements from onboard odometry
Demonstration of ArUco/ChArUco world anchor markers establishing a global reference frame
Physical Robot Demonstration
Reactive collision avoidance performing a two-robot swap (updated real-world video)
CBS Swap Scenario #1
CBS-planned swap demonstrating coordinated, collision-free robot motion
CBS Swap Scenario #2
Another CBS-based swap scenario showing robust conflict handling
Next Steps
- Scale CBS deployment to more robots in real environments
- Improve localization robustness under dynamic lighting and partial camera occlusions
- Add dynamic obstacles
- Experiment with decentralized or hybrid planning architectures
- Integrate predictive models to anticipate conflicts before planning